机器人设计与智能运动控制系统团队
团队成员:曹文熬、甘金强、杨文剑、刘德刚、程鹏
研究方向:机器人先进本体结构设计、机器人嵌入式运动控制系统与算法,机器人深度学习、四足/人形机器人3D自动建图导航,四足/人形机器人强化学习(具体见团队抖音号:aorobot)
团队近年主持国家自然科学基金面上项目2项,青年基金3项,获教育部自然科学二等奖,主持企业横向30多项,在机器人机构学顶刊发表SCI论文50多篇,授权发明专利30多项。在机器人先进本体结构设计、机器人嵌入式运动控制系统与轨迹平滑算法,四足/人形机器人3D自动建图导航,四足/人形机器人强化学习等方面研究有深厚的技术积累。研制了多种自主产权的并联机器人,混联机器人,柔性机器人、刚柔耦合仿人形手臂,蛇形连续体机器人,机器人欠驱动自适应抓手,开发了多种机器人运动控制系统。相关成果已成功落地应用到十多家企业,与兵器工业集团、中科院高能物理研究所,中船重工、湖北楚大智能装备,深圳正运动、武汉蓝讯数控设备等国内知名企业在机器人领域建立了长期良好的合作关系。
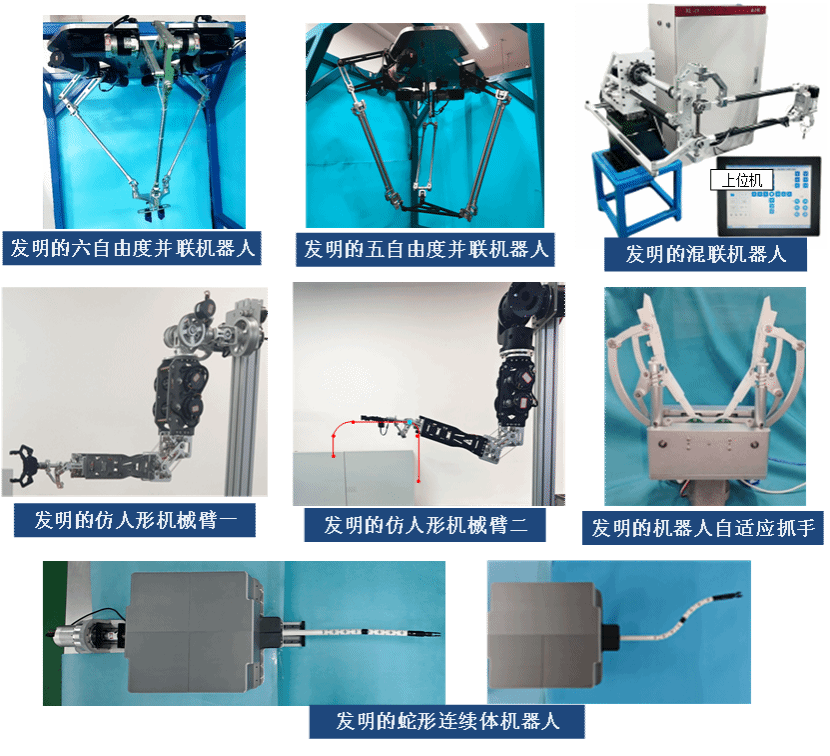
团队发明并研制的机器人
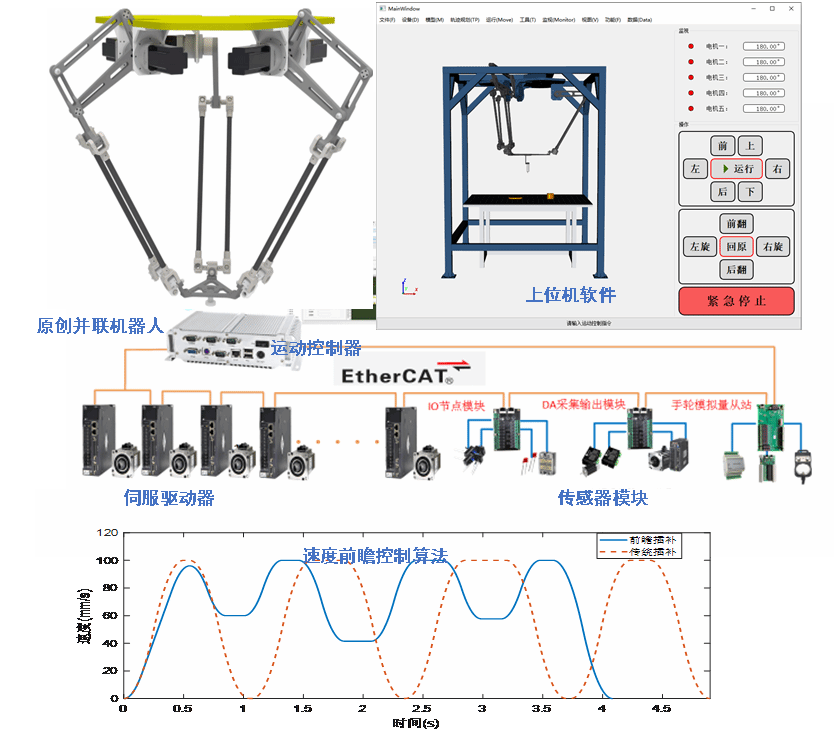
团队面向工业机器人应用开发的控制系统
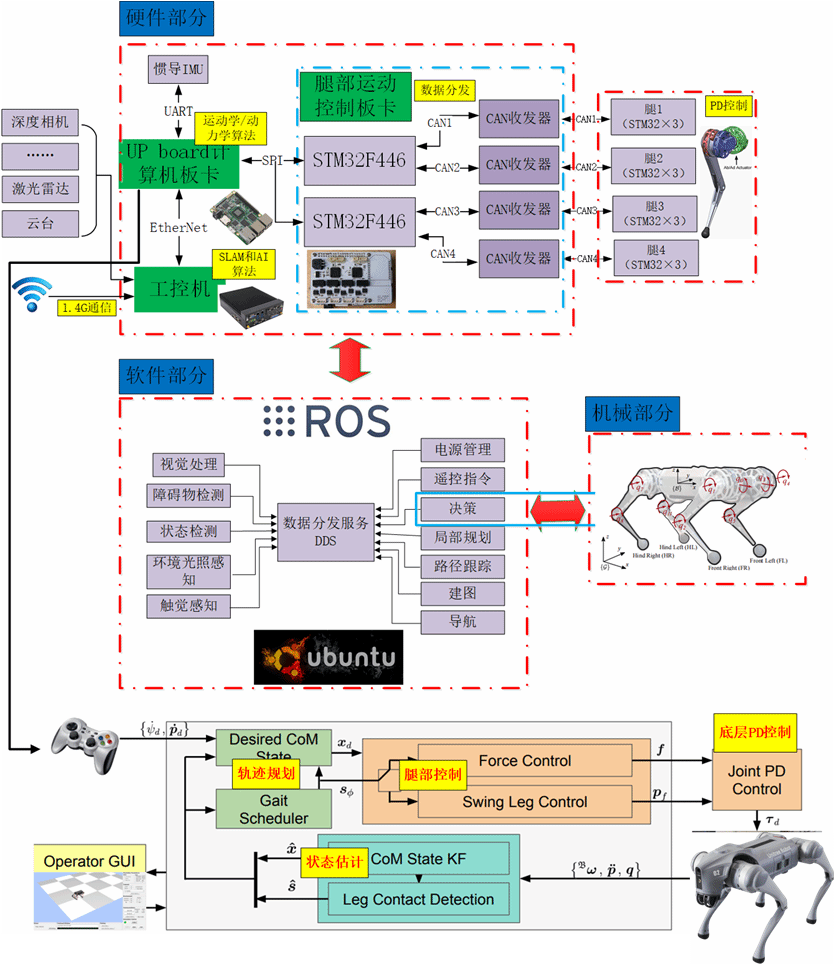
团队面向四足/人形机器人研究的具身智能控制系统与算法



{kind=link}